
Lõikuvate sirgete vaheline nurk: määratlus, leidmise näited. Lihtsamad ülesanded sirgjoonega tasapinnal

Oi-oi-oi-oi ... no on tina, nagu loed lause enda ette =) Küll aga aitab siis lõõgastus, seda enam, et ostsin täna sobivad aksessuaarid. Seetõttu jätkame esimese jaotisega, loodan, et artikli lõpuks säilitan rõõmsa meeleolu.
Kahe sirgjoone vastastikune paigutus
Juhtum, kui saal laulab kooris kaasa. Kaks rida saab:
1) vaste;
2) olema paralleelne: ;
3) või lõikuvad ühes punktis: .
Abi mannekeenidele : palun pidage meeles ristmiku matemaatilist märki, see juhtub väga sageli. Kirje tähendab, et joon lõikub punktis oleva sirgega.
Kuidas määrata kahe joone suhtelist asukohta?
Alustame esimese juhtumiga:
Kaks sirget langevad kokku siis ja ainult siis, kui nende vastavad koefitsiendid on proportsionaalsed, see tähendab, et on olemas selline arv "lambda", et võrdsused
Vaatleme sirgeid ja koostame vastavatest kordajatest kolm võrrandit: . Igast võrrandist järeldub, et seega need jooned langevad kokku.
Tõepoolest, kui kõik võrrandi koefitsiendid ![]() korrutage -1-ga (muutke märke) ja kõik võrrandi koefitsiendid
korrutage -1-ga (muutke märke) ja kõik võrrandi koefitsiendid ![]() vähendades 2 võrra, saate sama võrrandi: .
vähendades 2 võrra, saate sama võrrandi: .
Teine juhtum, kui jooned on paralleelsed:
Kaks sirget on paralleelsed siis ja ainult siis, kui nende koefitsiendid muutujatel on võrdelised: ![]() , aga.
, aga.
Näiteks võtke kaks sirgjoont. Kontrollime muutujate vastavate koefitsientide proportsionaalsust: ![]()
Siiski on selge, et.
Ja kolmas juhtum, kui jooned ristuvad:
Kaks sirget lõikuvad siis ja ainult siis, kui nende muutujate koefitsiendid EI OLE proportsionaalsed, see tähendab, et "lambda" väärtust EI OLE, et võrdsused oleksid täidetud ![]()
Niisiis, sirgjoonte jaoks koostame süsteemi: ![]()
Esimesest võrrandist järeldub, et , ja teisest võrrandist: , seega, süsteem on ebaühtlane(lahendused puuduvad). Seega ei ole muutujate koefitsiendid proportsionaalsed.
Järeldus: jooned lõikuvad
Praktilistes ülesannetes saab kasutada just vaadeldud lahendusskeemi. Muide, see on väga sarnane vektorite kollineaarsuse kontrollimise algoritmiga, mida me õppetunnis käsitlesime. Vektorite lineaarse (mitte)sõltuvuse mõiste. Vektori alus. Kuid on ka tsiviliseeritud pakett:
Näide 1
Uurige joonte suhtelist asukohta: 
Lahendus põhineb sirgjoonte suunavektorite uurimisel:
a) Võrranditest leiame sirgete suunavektorid: ![]() .
.
, nii et vektorid ei ole kollineaarsed ja sirged lõikuvad.
Igaks juhuks panen ristmikule osutitega kivi:
Ülejäänud hüppavad üle kivi ja järgnevad otse surmatu Kashchei juurde =)
b) Leidke sirgete suunavektorid: ![]()
Sirgedel on sama suunavektor, mis tähendab, et need on kas paralleelsed või samad. Siin pole determinant vajalik.
Ilmselt on tundmatute koefitsiendid proportsionaalsed, samas kui .
Uurime, kas võrdsus on tõsi: ![]()
Sellel viisil,
c) Leidke sirgete suunavektorid: ![]()
Arvutame determinandi, mis koosneb nende vektorite koordinaatidest: ![]() , seega on suunavektorid kollineaarsed. Jooned on kas paralleelsed või langevad kokku.
, seega on suunavektorid kollineaarsed. Jooned on kas paralleelsed või langevad kokku.
Proportsionaalsustegurit "lambda" on lihtne näha otse kollineaarsete suunavektorite suhtest. Kuid selle võib leida ka võrrandite endi koefitsientide kaudu: ![]() .
.
Nüüd uurime, kas võrdsus on tõsi. Mõlemad tasuta tingimused on null, seega:
Saadud väärtus rahuldab seda võrrandit (tavaliselt rahuldab seda iga arv).
Seega jooned langevad kokku.
Vastus:
Peagi õpite (või isegi olete juba õppinud) lahendama kaalutud probleemi sõna otseses mõttes mõne sekundiga. Sellega seoses ei näe ma põhjust iseseisva lahenduse jaoks midagi pakkuda, parem on panna geomeetrilisse vundamenti veel üks oluline tellis:
Kuidas tõmmata antud joonega paralleelset joont?
Selle lihtsaima ülesande teadmatuse eest karistab röövel Ööbik karmilt.
Näide 2
Sirge on antud võrrandiga . Kirjutage võrrand punkti läbiva paralleelse sirge jaoks.
Lahendus: tähistage tundmatut rida tähega . Mida seisund selle kohta ütleb? Joon läbib punkti. Ja kui sirged on paralleelsed, siis on ilmselge, et sirge "ce" suunav vektor sobib ka sirge "de" konstrueerimiseks.
Me võtame võrrandist välja suunavektori:
Vastus:
Näite geomeetria näeb välja lihtne: 
Analüütiline kontrollimine koosneb järgmistest etappidest:
1) Kontrollime, et joontel oleks sama suunavektor (kui sirge võrrandit pole korralikult lihtsustatud, siis on vektorid kollineaarsed).
2) Kontrollige, kas punkt rahuldab saadud võrrandit.
Analüütilist kontrollimist on enamikul juhtudel lihtne suuliselt läbi viia. Vaadake kahte võrrandit ja paljud teist saavad kiiresti aru, kuidas jooned on paralleelsed ilma jooniseta.
Tänased näited ise lahendamiseks on loomingulised. Sest Baba Yagaga tuleb ikka võistelda ja ta, teate, on igasuguste mõistatuste armastaja.
Näide 3
Kirjutage võrrand sirgele, mis läbib sirgega paralleelset punkti
Lahenduseks on ratsionaalne ja mitte väga ratsionaalne viis. Lühim tee on tunni lõpus.
Tegime paralleeljoontega veidi tööd ja tuleme nende juurde hiljem tagasi. Ühinevate joonte juhtum pakub vähe huvi, seega vaatleme probleemi, mis on teile kooli õppekavast hästi teada:
Kuidas leida kahe sirge lõikepunkt?
Kui sirge ![]() lõikuvad punktis , siis on selle koordinaadid lahenduseks lineaarvõrrandisüsteemid
lõikuvad punktis , siis on selle koordinaadid lahenduseks lineaarvõrrandisüsteemid ![]()
Kuidas leida sirgete lõikepunkti? Lahendage süsteem.
Siin on teile kahe tundmatuga lineaarvõrrandi süsteemi geomeetriline tähendus on kaks tasapinnal lõikuvat (kõige sagedamini) sirget.
Näide 4
Leidke sirgete lõikepunkt
Lahendus: Lahendamiseks on kaks võimalust – graafiline ja analüütiline.
Graafiline viis on lihtsalt joonistada etteantud jooned ja otse jooniselt leida ristumispunkt: 
Siin on meie mõte: . Kontrollimiseks tuleks igasse sirge võrrandisse asendada selle koordinaadid, need peaksid mahtuma nii sinna kui ka sinna. Teisisõnu, punkti koordinaadid on süsteemi lahendus. Tegelikult kaalusime graafilist lahendusviisi lineaarvõrrandisüsteemid kahe võrrandiga, kahe tundmatuga.
Graafiline meetod pole muidugi halb, kuid sellel on märgatavaid puudusi. Ei, asi pole selles, et seitsmenda klassi õpilased nii otsustavad, vaid selles, et õige ja TÄPSE joonise tegemine võtab aega. Lisaks pole mõnda joont nii lihtne konstrueerida ja lõikepunkt ise võib olla kuskil kolmekümnendas kuningriigis väljaspool märkmikulehte.
Seetõttu on lõikepunkti otstarbekam otsida analüütilise meetodiga. Lahendame süsteemi: 
Süsteemi lahendamiseks kasutati võrrandite terminipõhise liitmise meetodit. Vastavate oskuste arendamiseks külastage õppetundi Kuidas lahendada võrrandisüsteemi?
Vastus:
Kontrollimine on triviaalne – ristumispunkti koordinaadid peavad rahuldama süsteemi iga võrrandit.
Näide 5
Leidke sirgete lõikepunkt, kui need ristuvad.
See on tee-seda-ise näide. Probleemi on mugav jagada mitmeks etapiks. Seisundi analüüs näitab, et see on vajalik:
1) Kirjutage sirge võrrand.
2) Kirjutage sirge võrrand.
3) Uuri välja joonte suhteline asukoht.
4) Kui sirged lõikuvad, siis leidke lõikepunkt.
Tegevusalgoritmi väljatöötamine on tüüpiline paljude geomeetriliste ülesannete puhul ja sellele keskendun ma korduvalt.
Täielik lahendus ja vastus õpetuse lõpus:
Kingapaar pole veel kulunud, kuna jõudsime tunni teise osani:
Perpendikulaarsed jooned. Kaugus punktist jooneni.
Nurk ridade vahel
Alustame tüüpilise ja väga olulise ülesandega. Esimeses osas õppisime etteantud sirgega paralleelset sirget ehitama ja nüüd pöörab onn kanakoibadel 90 kraadi:
Kuidas tõmmata joont, mis on antud joonega risti?
Näide 6
Sirge on antud võrrandiga . Kirjutage võrrand punkti läbiva ristsirge jaoks.
Lahendus: Eeldusel on teada, et . Tore oleks leida sirge suunavektor. Kuna jooned on risti, on trikk lihtne:
Võrrandist “eemaldame” normaalvektori: , millest saab sirge suunav vektor.
Koostame sirgjoone võrrandi punktist ja suunavektorist:
Vastus: ![]()
Avame geomeetrilise visandi:

Hmm... Oranž taevas, oranž meri, oranž kaamel.
Lahenduse analüütiline kontrollimine:
1) Eraldage võrranditest suunavektorid ![]() ja abiga vektorite punktkorrutis järeldame, et sirged on tõepoolest risti: .
ja abiga vektorite punktkorrutis järeldame, et sirged on tõepoolest risti: .
Muide, võite kasutada tavalisi vektoreid, see on veelgi lihtsam.
2) Kontrollige, kas punkt rahuldab saadud võrrandit ![]() .
.
Kontrollimist on jällegi lihtne suuliselt läbi viia.
Näide 7
Leidke ristsirgete lõikepunkt, kui võrrand on teada ![]() ja punkt.
ja punkt.
See on tee-seda-ise näide. Ülesandes on mitu tegevust, mistõttu on mugav lahendust punkt-punkti kaupa järjestada.
Meie põnev teekond jätkub:
Kaugus punktist jooneni
Meie ees on sirge jõeriba ja meie ülesanne on jõuda selleni lühimat teed pidi. Takistused puuduvad ja kõige optimaalsem marsruut on liikumine mööda risti. See tähendab, et kaugus punktist sirgeni on risti oleva segmendi pikkus.
Geomeetrias tähistatakse kaugust traditsiooniliselt kreeka tähega "ro", näiteks: - kaugus punktist "em" sirgjooneni "de".
Kaugus punktist jooneni ![]() väljendatakse valemiga
väljendatakse valemiga![]()
Näide 8
Leidke kaugus punktist jooneni ![]()
Lahendus: kõik, mida vajate, on numbrid hoolikalt valemis asendada ja arvutused teha:
Vastus: ![]()
Teostame joonise: 
Leitud kaugus punktist jooneni on täpselt punase lõigu pikkus. Kui teed ruudulisele paberile joonise mõõtkavas 1 ühikut. \u003d 1 cm (2 lahtrit), siis saab kaugust mõõta tavalise joonlauaga.
Mõelge teisele ülesandele sama joonise järgi:
Ülesandeks on leida punkti koordinaadid, mis on sirge suhtes sümmeetriline punktiga ![]() . Teen ettepaneku sooritada toimingud ise, kuid kirjeldan lahendusalgoritmi vahetulemustega:
. Teen ettepaneku sooritada toimingud ise, kuid kirjeldan lahendusalgoritmi vahetulemustega:
1) Leidke sirge, mis on joonega risti.
2) Leidke sirgete lõikepunkt: ![]() .
.
Mõlemat toimingut käsitletakse üksikasjalikult selles õppetükis.
3) Punkt on lõigu keskpunkt. Keskmise ja ühe otsa koordinaadid on meile teada. Kõrval lõigu keskkoha koordinaatide valemid leida .
Ei ole üleliigne kontrollida, kas kaugus on samuti võrdne 2,2 ühikuga.
Siin võib arvutustes raskusi tekkida, kuid tornis aitab palju kaasa mikrokalkulaator, mis võimaldab lugeda tavalisi murde. Olen korduvalt nõu andnud ja soovitan veel.
Kuidas leida kaugust kahe paralleelse sirge vahel?
Näide 9
Leidke kahe paralleelse sirge vaheline kaugus
See on veel üks näide sõltumatust lahendusest. Väike vihje: lahendusviise on lõpmatult palju. Tunni lõpus ülevaade, kuid parem proovige ise arvata, arvan, et teil õnnestus oma leidlikkust hästi hajutada.
Nurk kahe joone vahel
Ükskõik milline nurk, siis lengi: 
Geomeetrias võetakse VÄIKSEMAKS nurgaks kahe sirge vaheline nurk, millest järeldub automaatselt, et see ei saa olla nüri. Joonisel ei loeta punase kaarega näidatud nurka ristuvate joonte vaheliseks nurgaks. Ja selle "roheline" naaber või vastupidiselt orienteeritud karmiinpunane nurk.
Kui jooned on risti, võib nendevaheliseks nurgaks võtta ükskõik millise neljast nurgast.
Kuidas nurgad erinevad? Orienteerumine. Esiteks on põhimõtteliselt oluline nurga "kerimise" suund. Teiseks kirjutatakse negatiivselt orienteeritud nurk miinusmärgiga, näiteks kui .
Miks ma seda ütlesin? Tundub, et tavapärase nurga mõistega saab hakkama. Fakt on see, et valemites, mille abil leiame nurgad, on lihtne saada negatiivne tulemus ja see ei tohiks teid üllatada. Miinusmärgiga nurk pole halvem ja sellel on väga spetsiifiline geomeetriline tähendus. Negatiivse nurga joonisel tuleb kindlasti noolega näidata selle suund (päripäeva).
Kuidas leida nurk kahe joone vahel? On kaks töövalemit:
Näide 10
Leidke ridade vaheline nurk
Lahendus ja Meetod üks
Vaatleme kahte sirget, mis on antud võrranditega üldkujul: ![]()
Kui sirge mitte risti, siis orienteeritud nendevahelise nurga saab arvutada järgmise valemi abil: 
Pöörame hoolega tähelepanu nimetajale – see on täpselt nii skalaarkorrutis sirgjoonte suunavektorid:
Kui , siis valemi nimetaja kaob ja vektorid on ortogonaalsed ja jooned risti. Seetõttu tehti reservatsioon sõnastuses olevate joonte mitteperpendikulaarsuse osas.
Eelneva põhjal vormistatakse lahendus mugavalt kahes etapis:
1) Arvutage sirgjoonte suunavektorite skalaarkorrutis:
nii et jooned ei ole risti.
2) Leiame joonte vahelise nurga valemiga:

Kasutades pöördfunktsiooni, on nurga enda leidmine lihtne. Sel juhul kasutame kaartangensi veidrust (vt joonis 1). Elementaarfunktsioonide graafikud ja omadused):![]()
Vastus: ![]()
Vastuses märgime kalkulaatori abil arvutatud täpse väärtuse ja ka ligikaudse väärtuse (soovitavalt nii kraadides kui radiaanides).
Noh, miinus, nii miinus, see on okei. Siin on geomeetriline illustratsioon: 
Pole üllatav, et nurk osutus negatiivse orientatsiooniga, sest ülesande seisukorras on esimene number sirge ja nurga “väänamine” algas just sellest.
Kui soovite tõesti positiivset nurka saada, peate sirgjooned vahetama, st võtma koefitsiendid teisest võrrandist ![]() ja võta koefitsiendid esimesest võrrandist . Lühidalt, peate alustama otsesest
ja võta koefitsiendid esimesest võrrandist . Lühidalt, peate alustama otsesest ![]() .
.
nurk ruumisirgete vahel nimetame mis tahes külgnevaid nurki, mille moodustavad kaks sirget, mis on tõmmatud läbi andmetega paralleelse suvalise punkti.
Olgu ruumis antud kaks sirget:
Ilmselt võib joonte vahelist nurka φ võtta nende suunavektorite ja vahelise nurgana. Kuna , siis vektoritevahelise nurga koosinuse valemi järgi saame
Kahe sirge paralleelsuse ja perpendikulaarsuse tingimused on samaväärsed nende suunavektorite paralleelsuse ja perpendikulaarsuse tingimustega ja:
Kaks otse on paralleelsed siis ja ainult siis, kui nende vastavad koefitsiendid on proportsionaalsed, st. l 1 paralleel l 2 siis ja ainult paralleelselt ![]() .
.
Kaks otse risti siis ja ainult siis, kui vastavate koefitsientide korrutiste summa on võrdne nulliga: .
Kell eesmärk joone ja tasapinna vahel
Lase rida d- ei ole risti tasapinnaga θ;
d′− sirge projektsioon d tasapinnale θ;
Sirgete vahelistest nurkadest väikseim d ja d"me helistame nurk sirge ja tasapinna vahel.
Tähistame seda kui φ=( d,θ)
Kui a d⊥θ , siis ( d,θ)=π/2

Oi→j→k→− ristkülikukujuline koordinaatsüsteem.
Tasapinnaline võrrand:
θ: Ax+Kõrval+cz+D=0
Leiame, et sirge on antud punkti ja suunavektoriga: d[M 0,lk→]
Vektor n→(A,B,C)⊥θ
Siis jääb üle välja selgitada vektorite vaheline nurk n→ ja lk→ tähistage seda kui γ=( n→,lk→).
Kui nurk γ<π/2 , то искомый угол φ=π/2−γ .
Kui nurk γ>π/2 , siis vajalik nurk φ=γ−π/2
sinφ=sin(2π−γ)=cosγ
sinφ=sin(γ−2π)=−cosγ
Siis nurk sirge ja tasapinna vahel saab arvutada järgmise valemi abil:
sinφ=∣cosγ∣=∣ ∣ Ap 1+bp 2+cp 3∣ ∣ √A 2+B 2+C 2√lk 21+lk 22+lk 23
29. küsimus. Ruutvormi mõiste. Ruutvormide märgimääratlus.
Ruutvorm j (x 1, x 2, ..., x n) n reaalset muutujat x 1, x 2, ..., x n nimetatakse vormi summaks 
 , (1)
, (1)
kus aij on mõningaid numbreid, mida nimetatakse koefitsientideks. Ilma üldistust kaotamata võime seda eeldada aij = a ji.
Ruutvormi nimetatakse kehtiv, kui aij
О GR. Ruutkujuline maatriks nimetatakse maatriksiks, mis koosneb selle koefitsientidest. Ruutvorm (1) vastab ainulaadsele sümmeetrilisele maatriksile  st. A T = A. Seetõttu saab ruutvormi (1) kirjutada maatriksi kujul j ( X) = x T Ah, kus x T = (X 1 X 2 … x n). (2)
st. A T = A. Seetõttu saab ruutvormi (1) kirjutada maatriksi kujul j ( X) = x T Ah, kus x T = (X 1 X 2 … x n). (2)
Ja vastupidi, iga sümmeetriline maatriks (2) vastab ainulaadsele ruutvormile kuni muutujate tähistuseni.
Ruutvormi aste nimetatakse selle maatriksi auastmeks. Ruutvormi nimetatakse mitte-degenereerunud, kui selle maatriks on mitteainsuseline AGA. (tuletage meelde, et maatriks AGA nimetatakse mittedegeneratiivseks, kui selle determinant on nullist erinev). Vastasel juhul on ruutvorm degenereerunud.
positiivne kindel(või rangelt positiivne), kui
j ( X) > 0 , kellelegi X = (X 1 , X 2 , …, x n), Pealegi X = (0, 0, …, 0).
Maatriks AGA positiivne kindel ruutvorm j ( X) nimetatakse ka positiivseks kindlaks. Seetõttu vastab positiivne kindel ruutvorm ainulaadsele positiivsele kindlale maatriksile ja vastupidi.
Ruutkuju (1) nimetatakse negatiivne kindel(või rangelt negatiivne), kui
j ( X) < 0, для любого X = (X 1 , X 2 , …, x n), Pealegi X = (0, 0, …, 0).
Sarnaselt ülaltoodule nimetatakse negatiivse-määratletud ruutmaatriksit ka negatiivseks-kindlaks.
Seetõttu on positiivselt (negatiivselt) kindel ruutvorm j ( X) jõuab minimaalse (maksimaalse) väärtuseni j ( X*) = 0 jaoks X* = (0, 0, …, 0).
Pange tähele, et enamik ruutvorme ei ole märgikindlad, st nad ei ole positiivsed ega negatiivsed. Sellised ruutvormid kaovad mitte ainult koordinaatsüsteemi alguspunktis, vaid ka teistes punktides.
Millal n> 2, ruutvormi märgimääratluse kontrollimiseks on vaja erikriteeriume. Vaatleme neid.
Suured alaealised ruutvorme nimetatakse alaealisteks:


see tähendab, et need on alaealised järgus 1, 2, …, n maatriksid AGA, mis asub vasakus ülanurgas, viimane neist ühtib maatriksi determinandiga AGA.
Positiivse määratuse kriteerium (Sylvesteri kriteerium)
X) = x T Ah on positiivne kindel, on vajalik ja piisav, et kõik maatriksi peamised alaealised AGA olid positiivsed, see tähendab: M 1 > 0, M 2 > 0, …, M n > 0. Negatiivse kindluse kriteerium Selleks, et ruutvorm j ( X) = x T Ah on negatiivne kindel, siis on vajalik ja piisav, et selle paarisjärjekorras põhimollid on positiivsed ja paaritu järjekorra põhimollid negatiivsed, st: M 1 < 0, M 2 > 0, M 3 < 0, …, (–1)n
Igal matemaatikaeksamiks valmistuval õpilasel on kasulik korrata teemat “Joondevahelise nurga leidmine”. Nagu näitab statistika, tekitavad selle stereomeetria sektsiooni ülesanded atesteerimistesti sooritamisel raskusi paljudele õpilastele. Samas leidub USE-s nii põhi- kui ka profiilitasemel ülesandeid, mis nõuavad sirgete vahelise nurga leidmist. See tähendab, et igaüks peaks suutma need lahendada.
Põhilised hetked
Ruumis on 4 joonte vastastikust paigutust. Need võivad kokku langeda, ristuda, olla paralleelsed või ristuvad. Nende vaheline nurk võib olla terav või sirge.
Ühtse riigieksami või näiteks lahenduse joonte vahelise nurga leidmiseks saavad Moskva ja teiste linnade koolilapsed selles stereomeetria jaotises probleemide lahendamiseks kasutada mitmeid meetodeid. Ülesande saate täita klassikaliste konstruktsioonide abil. Selleks tasub selgeks õppida stereomeetria põhiaksioomid ja teoreemid. Õpilane peab oskama loogiliselt üles ehitada arutluskäiku ja koostada jooniseid, et viia ülesanne planimeetrilise ülesandeni.
Võite kasutada ka vektor-koordinaatide meetodit, kasutades lihtsaid valemeid, reegleid ja algoritme. Peamine asi on sel juhul kõigi arvutuste korrektne sooritamine. Shkolkovo haridusprojekt aitab teil lihvida oma oskusi stereomeetria ja muude koolikursuse osade probleemide lahendamisel.
See materjal on pühendatud sellisele kontseptsioonile nagu kahe ristuva sirge vaheline nurk. Esimeses lõigus selgitame, mis see on, ja näitame seda illustratsioonides. Seejärel analüüsime, kuidas saate leida selle nurga siinuse, koosinuse ja nurga enda (vaatame eraldi juhtumeid tasapinna ja ruumilise ruumiga), anname vajalikud valemid ja näitame näidetega, kuidas neid täpselt rakendatakse praktikas.
Yandex.RTB R-A-339285-1
Selleks, et mõista, mis on kahe sirge ristumiskohas moodustatud nurk, peame meenutama nurga, risti ja lõikepunkti määratlust.
Definitsioon 1
Me nimetame kahte sirget ristuvateks, kui neil on üks ühine punkt. Seda punkti nimetatakse kahe sirge lõikepunktiks.
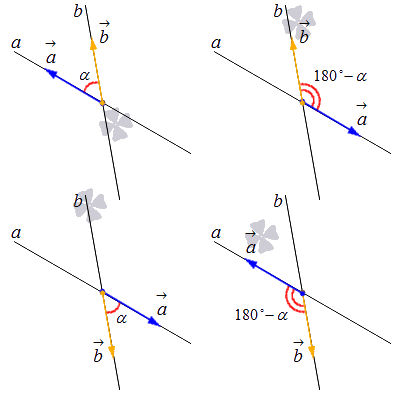
Iga sirge on lõikepunktiga jagatud kiirteks. Sel juhul moodustavad mõlemad jooned 4 nurka, millest kaks on vertikaalsed ja kaks külgnevad. Kui me teame ühe neist mõõtu, saame määrata ka ülejäänud ülejäänud.
Oletame, et teame, et üks nurkadest on võrdne α-ga. Sellisel juhul on selle suhtes vertikaalne nurk samuti võrdne α-ga. Ülejäänud nurkade leidmiseks peame arvutama erinevuse 180 ° - α . Kui α on 90 kraadi, on kõik nurgad õiged. Täisnurga all lõikuvaid sirgeid nimetatakse risti (perpendikulaarsuse mõistele on pühendatud eraldi artikkel).
Vaata pilti:
Jätkame põhimääratluse sõnastamisega.
2. definitsioon
Kahe ristuva sirge moodustatud nurk on need kaks joont moodustavast neljast nurgast väiksema mõõt.
Definitsioonist tuleb teha oluline järeldus: nurga suurust väljendatakse sel juhul suvalise reaalarvuga intervallis (0 , 90 ] . Kui sirged on risti, siis on nendevaheline nurk igal juhul võrdne 90 kraadiga.

Võimalus leida kahe ristuva sirge vahelise nurga mõõt on kasulik paljude praktiliste ülesannete lahendamisel. Lahendusmeetodi saab valida mitme valiku hulgast.
Alustuseks võime kasutada geomeetrilisi meetodeid. Kui me teame midagi lisanurkade kohta, siis saame need ühendada vajaliku nurgaga, kasutades võrdsete või sarnaste kujundite omadusi. Näiteks kui teame kolmnurga külgi ja on vaja arvutada nurk nende sirgete vahel, millel need küljed asuvad, siis sobib lahendamiseks koosinusteoreem. Kui tingimusel on täisnurkne kolmnurk, siis peame arvutusteks teadma ka nurga siinust, koosinust ja puutujat.
Seda tüüpi ülesannete lahendamiseks on väga mugav ka koordinaatmeetod. Selgitame, kuidas seda õigesti kasutada.
Meil on ristkülikukujuline (ristkülikukujuline) koordinaatsüsteem O x y kahe sirgega. Tähistame neid tähtedega a ja b. Sel juhul saab sirgjooni kirjeldada mis tahes võrrandi abil. Algsetel sirgetel on lõikepunkt M . Kuidas määrata nende joonte vahel soovitud nurka (tähistagem α)?
Alustame antud tingimustel nurga leidmise põhiprintsiibi sõnastamisest.
Teame, et sellised mõisted nagu suunamine ja normaalvektor on sirgjoone mõistega tihedalt seotud. Kui meil on mingi sirge võrrand, saame sealt võtta nende vektorite koordinaadid. Seda saame teha kahe risuva sirge jaoks korraga.
Kahe ristuva sirge moodustatud nurga saab leida kasutades:
- nurk suunavektorite vahel;
- nurk normaalvektorite vahel;
- nurk ühe sirge normaalvektori ja teise joone suunavektori vahel.
Nüüd vaatame iga meetodit eraldi.
1. Oletame, et meil on sirge a suunavektoriga a → = (a x , a y) ja sirge b suunavektoriga b → (b x , b y) . Nüüd paneme lõikepunktist kõrvale kaks vektorit a → ja b →. Pärast seda näeme, et nad asuvad igaüks oma liinil. Siis on meil nende suhtelise positsiooni jaoks neli võimalust. Vaata illustratsiooni:
Kui kahe vektori vaheline nurk ei ole nüri, on see nurk, mida vajame ristuvate sirgete a ja b vahel. Kui see on nüri, võrdub soovitud nurk nurgaga a → , b → ^ külgneva nurgaga. Seega α = a → , b → ^, kui a → , b → ^ ≤ 90 ° , ja α = 180 ° - a → , b → ^ kui a → , b → ^ > 90 ° .
Lähtudes sellest, et võrdsete nurkade koosinused on võrdsed, saame saadud võrrandid ümber kirjutada järgmiselt: cos α = cos a → , b → ^ kui a → , b → ^ ≤ 90 ° ; cos α = cos 180 ° - a → , b → ^ = - cos a → , b → ^ kui a → , b → ^ > 90 ° .
Teisel juhul kasutati redutseerimisvalemeid. Sellel viisil,
cos α cos a → , b → ^ , cos a → , b → ^ ≥ 0 - cos a → , b → ^ , cos a → , b → ^< 0 ⇔ cos α = cos a → , b → ^
Kirjutame viimase valemi sõnadega:
3. määratlus
Kahe ristuva sirge moodustatud nurga koosinus on võrdne selle suunavektorite vahelise nurga koosinusmooduliga.
Kahe vektori a → = (a x, a y) ja b → = (b x, b y) vahelise nurga koosinuse valemi üldvorm näeb välja järgmine:
cos a → , b → ^ = a → , b → ^ a → b → = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Sellest saame tuletada kahe antud sirge vahelise nurga koosinuse valemi:
cos α = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2 = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Seejärel saab nurga enda leida järgmise valemi abil:
α = a r c cos a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Siin on a → = (a x , a y) ja b → = (b x , b y) antud sirgete suunavektorid.
Toome näite probleemi lahendamisest.
Näide 1
Ristkülikukujulises koordinaatsüsteemis on tasapinnal antud kaks ristuvat sirget a ja b. Neid saab kirjeldada parameetriliste võrranditega x = 1 + 4 · λ y = 2 + λ λ ∈ R ja x 5 = y - 6 - 3 . Arvutage nende joonte vaheline nurk.
Lahendus
Meil on tingimuses parameetriline võrrand, mis tähendab, et selle sirge jaoks saame kohe kirja panna selle suunavektori koordinaadid. Selleks peame võtma parameetri koefitsientide väärtused, st. sirgel x = 1 + 4 λ y = 2 + λ λ ∈ R on suunavektor a → = (4 , 1) .
Teist sirget kirjeldatakse kanoonilise võrrandi x 5 = y-6-3 abil. Siin saame koordinaadid nimetajatest võtta. Seega on sellel sirgel suunavektor b → = (5 , - 3) .
Järgmisena jätkame otse nurga leidmisega. Selleks asendage lihtsalt kahe vektori saadaolevad koordinaadid ülaltoodud valemiga α = a r c cos a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2 . Saame järgmise:
α = a rc cos 4 5 + 1 (- 3) 4 2 + 1 2 5 2 + (- 3) 2 = a r c cos 17 17 34 = a r c cos 1 2 = 45°
Vastus: need jooned moodustavad 45 kraadise nurga.
Sarnase ülesande saame lahendada normaalvektorite vahelise nurga leidmisega. Kui meil on sirge a normaalvektoriga n a → = (n a x , n a y) ja sirge b normaalvektoriga n b → = (n b x , n b y) , siis on nendevaheline nurk võrdne nurgaga n a → ja n b → või nurk, mis külgneb nurgaga n a → , n b → ^ . See meetod on näidatud pildil:

Valemid ristumisjoonte ja selle nurga enda vahelise nurga koosinuse arvutamiseks normaalvektorite koordinaatide abil näevad välja järgmised:
cos α = cos n a → , n b → ^ = n a x n b x + n a y + n b y n a x 2 + n a y 2 n b x 2 + n b y 2
Siin n a → ja n b → tähistavad kahe antud sirge normaalvektoreid.
Näide 2
Kaks sirget on antud ristkülikukujulises koordinaatsüsteemis, kasutades võrrandeid 3 x + 5 y - 30 = 0 ja x + 4 y - 17 = 0 . Leidke nendevahelise nurga siinus, koosinus ja selle nurga suurus.
Lahendus
Algsed sirged on antud kasutades tavalisi sirge võrrandeid kujul A x + B y + C = 0 . Tähistame normaalvektorit n → = (A , B) . Leiame ühe sirge esimese normaalvektori koordinaadid ja kirjutame need üles: n a → = (3 , 5) . Teise rea x + 4 y - 17 = 0 korral on normaalvektori koordinaadid n b → = (1 , 4) . Nüüd lisage saadud väärtused valemile ja arvutage kokku:
cos α = cos n a → , n b → ^ = 3 1 + 5 4 3 2 + 5 2 1 2 + 4 2 = 23 34 17 = 23 2 34
Kui teame nurga koosinust, saame selle siinuse arvutada trigonomeetrilise põhiidentiteedi abil. Kuna sirgjoonte moodustatud nurk α ei ole nüri, siis sin α \u003d 1 - cos 2 α \u003d 1 - 23 2 34 2 \u003d 7 2 34.
Sel juhul α = a r c cos 23 2 34 = a r c sin 7 2 34 .
Vastus: cos α = 23 2 34, sin α = 7 2 34, α = a r c cos 23 2 34 = a r c sin 7 2 34
Analüüsime viimast juhtumit - sirgetevahelise nurga leidmist, kui teame ühe sirge suunavektori ja teise normaalvektori koordinaate.
Oletame, et sirgel a on suunavektor a → = (a x , a y) ja sirgel b normaalvektor n b → = (n b x , n b y) . Peame need vektorid ristumispunktist edasi lükkama ja kaaluma kõiki nende suhtelise asukoha võimalusi. Vaata pilti:

Kui antud vektorite vaheline nurk ei ole suurem kui 90 kraadi, siis selgub, et see täiendab a ja b vahelist nurka täisnurgaks.
a → , n b → ^ = 90 ° - α , kui a → , n b → ^ ≤ 90 ° .
Kui see on alla 90 kraadi, saame järgmise:
a → , n b → ^ > 90 ° , siis a → , n b → ^ = 90 ° + α
Kasutades võrdsete nurkade koosinuste võrdsuse reeglit, kirjutame:
cos a → , n b → ^ = cos (90 ° - α) = sin α a → , n b → ^ ≤ 90 ° korral.
cos a → , n b → ^ = cos 90 ° + α = - sin α juures a → , n b → ^ > 90 ° .
Sellel viisil,
sin α = cos a → , n b → ^ , a → , n b → ^ ≤ 90 ° - cos a → , n b → ^ , a → , n b → ^ > 90 ° ⇔ sin α = cos a → , n b → ^ , a → , n b → ^ > 0 - cos a → , n b → ^ , a → , n b → ^< 0 ⇔ ⇔ sin α = cos a → , n b → ^
Sõnastame järelduse.
4. määratlus
Kahe tasapinnas lõikuva sirge vahelise nurga siinuse leidmiseks tuleb arvutada esimese sirge suunavektori ja teise normaalvektori vahelise nurga koosinusmoodul.
Paneme kirja vajalikud valemid. Nurga siinuse leidmine:
sin α = cos a → , n b → ^ = a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2
Nurga enda leidmine:
α = a r c sin = a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2
Siin on a → esimese rea suunavektor ja n b → teise rea normaalvektor.
Näide 3
Kaks lõikuvat sirget on antud võrranditega x - 5 = y - 6 3 ja x + 4 y - 17 = 0 . Leidke ristumisnurk.
Lahendus
Antud võrranditest võtame suuna- ja normaalvektori koordinaadid. Selgub a → = (- 5 , 3) ja n → b = (1 , 4) . Võtame valemi α \u003d a r c sin \u003d a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2 ja kaalume:
α = a r c sin = - 5 1 + 3 4 (- 5) 2 + 3 2 1 2 + 4 2 = a r c sin 7 2 34
Pange tähele, et võtsime võrrandid eelmisest ülesandest ja saime täpselt sama tulemuse, kuid erineval viisil.
Vastus:α = a r c sin 7 2 34
Siin on veel üks viis soovitud nurga leidmiseks, kasutades antud joonte kaldekoefitsiente.
Meil on sirge a , mis on defineeritud ristkülikukujulises koordinaatsüsteemis võrrandiga y = k 1 · x + b 1 , ja sirge b , mis on defineeritud kui y = k 2 · x + b 2 . Need on kaldega joonte võrrandid. Ristmikunurga leidmiseks kasutage valemit:
α = a r c cos k 1 k 2 + 1 k 1 2 + 1 k 2 2 + 1 , kus k 1 ja k 2 on antud sirgete kalded. Selle rekordi saamiseks kasutati normaalvektorite koordinaatide kaudu nurga määramise valemeid.
Näide 4
Tasapinnas ristuvad kaks sirget, mis on antud võrranditega y = - 3 5 x + 6 ja y = - 1 4 x + 17 4 . Arvutage ristumisnurk.
Lahendus
Meie sirgete kalded on võrdsed k 1 = - 3 5 ja k 2 = - 1 4 . Liidame need valemisse α = a r c cos k 1 k 2 + 1 k 1 2 + 1 k 2 2 + 1 ja arvutame:
α = a r c cos - 3 5 - 1 4 + 1 - 3 5 2 + 1 - 1 4 2 + 1 = a r c cos 23 20 34 24 17 16 = a r c cos 23 2 34
Vastus:α = a r c cos 23 2 34
Selle lõigu järeldustes tuleb märkida, et siin toodud nurga leidmise valemeid ei pea pähe õppima. Selleks piisab, kui tead antud sirgete juhikute ja/või normaalvektorite koordinaate ning oskad neid erinevat tüüpi võrrandite abil määrata. Kuid nurga koosinuse arvutamise valemid on parem meeles pidada või üles kirjutada.
Kuidas arvutada ruumis ristuvate joonte vahelist nurka
Sellise nurga arvutamise võib taandada suunavektorite koordinaatide arvutamisele ja nende vektorite poolt moodustatud nurga suuruse määramisele. Selliste näidete puhul kasutame samu arutluskäike, mida oleme varem esitanud.
Oletame, et meil on 3D-ruumis ristkülikukujuline koordinaatsüsteem. See sisaldab kahte sirget a ja b lõikepunktiga M . Suunavektorite koordinaatide arvutamiseks peame teadma nende sirgete võrrandeid. Tähistame suunavektorid a → = (a x , a y , a z) ja b → = (b x , b y , b z) . Nendevahelise nurga koosinuse arvutamiseks kasutame valemit:
cos α = cos a → , b → ^ = a → , b → a → b → = a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2
Nurga enda leidmiseks vajame järgmist valemit:
α = a r c cos a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2
Näide 5
Meil on 3D-ruumis defineeritud sirgjoon, kasutades võrrandit x 1 = y - 3 = z + 3 - 2 . On teada, et see lõikub O z teljega. Arvutage lõikenurk ja selle nurga koosinus.
Lahendus
Tähistame arvutatavat nurka tähega α. Kirjutame üles esimese sirge suunavektori koordinaadid - a → = (1 , - 3 , - 2) . Rakendustelje puhul saame juhiseks võtta koordinaatvektori k → = (0 , 0 , 1). Oleme saanud vajalikud andmed ja saame lisada need soovitud valemisse:
cos α = cos a → , k → ^ = a → , k → a → k → = 1 0 - 3 0 - 2 1 1 2 + (- 3) 2 + (- 2) 2 0 2 + 0 2 + 1 2 = 2 8 = 1 2
Selle tulemusena saime, et vajalik nurk on võrdne a r c cos 1 2 = 45 °.
Vastus: cos α = 1 2 , α = 45 ° .
Kui märkate tekstis viga, tõstke see esile ja vajutage Ctrl+Enter
Ma teen lühidalt. Kahe sirge vaheline nurk on võrdne nende suunavektorite vahelise nurgaga. Seega, kui teil õnnestub leida suunavektorite a \u003d (x 1; y 1; z 1) ja b \u003d (x 2; y 2; z 2) koordinaadid, saate nurga leida. Täpsemalt nurga koosinus vastavalt valemile:
Vaatame, kuidas see valem konkreetsetel näidetel töötab:
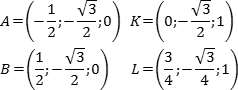
Ülesanne. Punktid E ja F on märgitud kuubis ABCDA 1 B 1 C 1 D 1 - vastavalt servade A 1 B 1 ja B 1 C 1 keskpunktid. Leidke nurk sirgete AE ja BF vahel.

Kuna kuubi serv ei ole määratud, siis määrame AB = 1. Tutvustame standardse koordinaatsüsteemi: alguspunkt on punktis A ning teljed x, y, z on suunatud vastavalt mööda AB, AD ja AA 1 . Ühiklõik on võrdne AB = 1. Nüüd leiame oma sirgete suunavektorite koordinaadid.
Leia vektori AE koordinaadid. Selleks vajame punkte A = (0; 0; 0) ja E = (0,5; 0; 1). Kuna punkt E on lõigu A 1 B 1 keskpunkt, on selle koordinaadid võrdsed otste koordinaatide aritmeetilise keskmisega. Pange tähele, et vektori AE alguspunkt ühtib alguspunktiga, seega AE = (0,5; 0; 1).
Nüüd käsitleme BF-vektorit. Samamoodi analüüsime punkte B = (1; 0; 0) ja F = (1; 0,5; 1), sest F - segmendi B 1 C 1 keskosa. Meil on:
BF = (1 - 1; 0,5 - 0; 1 - 0) = (0; 0,5; 1).
Niisiis, suunavektorid on valmis. Joontevahelise nurga koosinus on suunavektorite vahelise nurga koosinus, seega on meil:
Ülesanne. Korrapärases kolmnurkses prismas ABCA 1 B 1 C 1, mille kõik servad on võrdsed 1-ga, on märgitud punktid D ja E - vastavalt servade A 1 B 1 ja B 1 C 1 keskpunktid. Leidke sirgete AD ja BE vaheline nurk.

Tutvustame standardset koordinaatsüsteemi: alguspunkt on punktis A, x-telg on suunatud piki AB, z - mööda AA 1 . Suuname y-telje nii, et OXY tasand langeb kokku ABC tasandiga. Ühiklõik on võrdne AB = 1. Leidke soovitud sirgete suunavektorite koordinaadid.
Kõigepealt leiame AD vektori koordinaadid. Vaatleme punkte: A = (0; 0; 0) ja D = (0,5; 0; 1), sest D - segmendi A 1 B 1 keskosa. Kuna vektori AD algus langeb kokku alguspunktiga, saame AD = (0,5; 0; 1).
Nüüd leiame vektori BE koordinaadid. Punkti B = (1; 0; 0) on lihtne arvutada. Punktiga E - segmendi keskosa C 1 B 1 - veidi keerulisem. Meil on:
Jääb üle leida nurga koosinus:

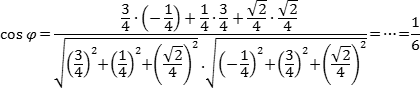
Ülesanne. Korrapärases kuusnurkses prismas ABCDEFA 1 B 1 C 1 D 1 E 1 F 1, mille kõik servad on võrdsed 1-ga, on märgitud punktid K ja L - servade A 1 B 1 ja B 1 C 1 keskpunktid, vastavalt. Leidke sirgete AK ja BL vaheline nurk.

Tutvustame prisma standardset koordinaatide süsteemi: asetame koordinaatide alguspunkti alumise aluse keskele, suuname x-telje mööda FC-d, y-telje läbi lõikude AB ja DE keskpunktide ning z-telje. vertikaalselt ülespoole. Ühiklõik on jällegi võrdne AB = 1. Kirjutame välja meile huvipakkuvate punktide koordinaadid:
Punktid K ja L on vastavalt lõikude A 1 B 1 ja B 1 C 1 keskpunktid, seega leitakse nende koordinaadid läbi aritmeetilise keskmise. Teades punkte, leiame suunavektorite AK ja BL koordinaadid:
Nüüd leiame nurga koosinuse:

Ülesanne. Tavalises nelinurkses püramiidis SABCD, mille kõik servad on võrdsed 1-ga, on tähistatud punktid E ja F – vastavalt külgede SB ja SC keskpunktid. Leidke nurk sirgete AE ja BF vahel.

Tutvustame standardset koordinaatsüsteemi: alguspunkt on punktis A, x- ja y-telg on suunatud vastavalt AB ja AD ning z-telg vertikaalselt ülespoole. Ühiku segment on võrdne AB = 1.
Punktid E ja F on vastavalt lõikude SB ja SC keskpunktid, seega leitakse nende koordinaadid otste aritmeetilise keskmisena. Kirjutame üles meile huvipakkuvate punktide koordinaadid:
A = (0; 0; 0); B = (1; 0; 0)
Teades punkte, leiame suunavektorite AE ja BF koordinaadid:
Vektori AE koordinaadid langevad kokku punkti E koordinaatidega, kuna punkt A on alguspunkt. Jääb üle leida nurga koosinus:
Seotud väljaanded
-
 Unenägude tähendus Natalia Stepanova suure unenägude raamatu järgi
Unenägude tähendus Natalia Stepanova suure unenägude raamatu järgi
Teen ettepaneku mitte seletada traditsioonilises mõttes unenägusid mitte analüüsida, vaid neid tõlgendada, nagu inimesed teevad ja on teinud ...
-
 Suurimad peamised naftajuhtmed
Suurimad peamised naftajuhtmed
Nafta ja naftasaaduste meretranspordiks loodud maailma tankerlaevastik erineb teistest kaubalaevanduse sektoritest ...